-
저전압 차동 신호(LVDS: Low-voltage differential signaling) 디바이스에는 종종 서로 다른 버전이 같은 시스템 안에 통합될 수 있기 때문에 여러가지 선택이 있을 수 있다. LVDS, 버스 기반형 LVDS, 멀티 포인트 LVDS (M-LVDS) 디바이스를 이용할 수 있다. 이러한 디바이스들은 같은 시스템에서 작동할 수 있을까? 한 시스템에서 기술들이 혼합되었을 때 해결해야 할 문제점은 무엇인가? “유사하지만 다른” 디바이스를 결합했을 때 한계는 무엇인가? LVDS 기술은 각기 장/단점을 가지고 있다.글 : Jim Dietz, Richard Hubbard/텍사스 인스트루먼트
도입
저전압 차동 신호(LVDS: Low-voltage differential signaling) 디바이스에는 여러가지 선택이 있을 수있다. 종종 서로 다른 버전이 같은 시스템 안에 통합될 수 있기 때문이다. LVDS, 버스 기반형 LVDS, 멀티 포인트 LVDS (M-LVDS) 디바이스를 이용할 수 있다. 이러한 디바이스들은 같은 시스템에서 작동할 수 있을까? 한 시스템에서 기술들이 혼합되었을 때 해결해야 할 문제점은 무엇인가? “유사하지만 다른” 디바이스를 결합했을 때 한계는 무엇인가? LVDS 기술은 각기 장/단점을 가지고 있다. 단일 종단형신호와 비교할 때, 공통적인 장점은 저전력, 고속 및 낮은 EMI를 들 수 있다. 기술적인 제한 요소는 토폴로지 지원형, 허용 노드수, 구동 성능, 표준 준수 등이다.
이런 통합으로 인한 문제점을 최소화하기 위해 여러 표준들이 개발되고 있다. TIA/EIA-644A 표준은 점대점(point-to-point) 및 다중-드롭 애플리케이션을 위한 LVDS 디바이스 성능을 명시하고 있다. TIA/EIA-899 표준(M-LVDS)은 멀티 포인트 디바이스에 적합한 요구조건을 명시하고 있다. 처음 시스템을 개발할 때, 같은 시스템이 최상의 선택이 된다. 그러나, 종종 시스템은 다양한 공급업체가 제공한 모듈을 포함하고 있으며 서로 다른 물리층의 규격에 따른다. 이 기고문에서는 기술이 미치지 못할 때 가이드라인을 제공한다. 잠정적인 위험과 솔루션들이 확인할 수 있을 것이다. 기술을 “혼합 사용(mixed-use)” 한 시스템에 대한 제한 요소도 제시될 것이다.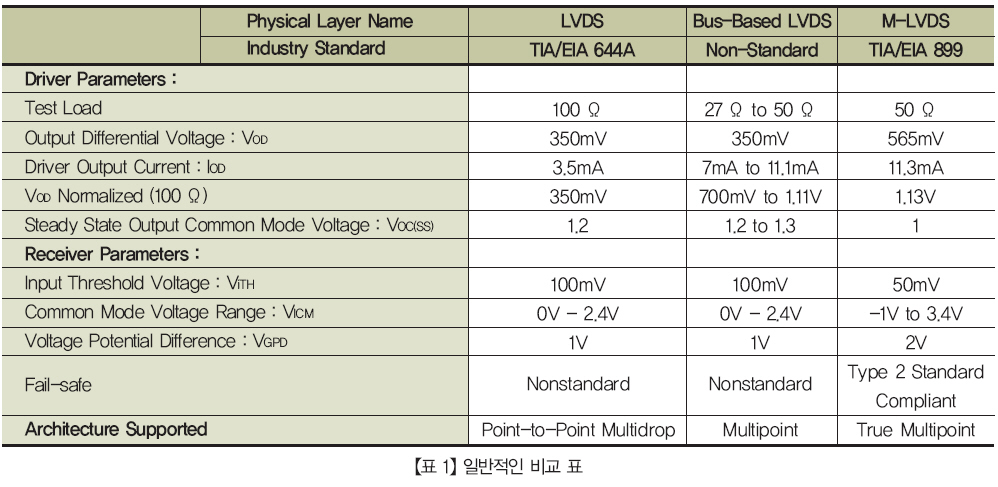
표 1은 LVDS 디바이스의 일반적인 분류를 위한 핵심 파라미터를 강조한다. 644A 표준은 다중-드롭 버스뿐만 아니라 점대점 버스를 위한 요구조건을 정의한다. 최고 32개의 수신기는 644A 버스에 연결될 수 있다. 드라이브 크기는 3.5mA이다. 버스 기반형 LVDS는 드라이브 크기를 증가시키면서 644A의 대부분의 특징들을 유지시킨다. 644A와 버스 기반형 LVDS는 동일한 수신기 커먼-모드 범위와 임계값을 공유한다. M-LVDS는 진정한 멀티-포인트 기능의 완벽한 보완을 제공한다. 11mA 드라이브 크기는 2배의 터미네이션(termination), 즉 부하성 백플레인(loaded backplane)을 지원한다. M-LVDS 수신기 임계값은 다른 기술의 임계값에 절반이며, 반면에 수신기 접지 가능성 오프셋은 2배가 된다.트랜스미터 스펙
표 1의 드라이버 파라미터를 보면, 부하 테스트는 데이터 시트 스펙을 보고하기 위해 사용된 임피던스를 확인한다. 출력 차동형 전압 VOD는 이 부하 테스트와 관련이 있다. 드라이버 출력 전류는 디바이스를 통해 공급된 유도성 부하 전류이다. 드라이버 크기를 표준화함으로써 중요한 기술을 비교할 수 있다. 표준화된 VOD 값은 트랜스미터가 100? 부하를 구동하는 이상적인 전류 소스로 작동하는 것으로 가설을 세울 수 있다. 모든 기술은 이상적인 전류 소스처럼 전혀 반응하지 않지만 비교하기에는 충분히 정확하다.수신기 스펙
100mV의 수신기 임계값은 M-LVDS를 제외하고 모든 신호에 대해 명시된다. M-LVDS 수신기는 민감도 면에서 2배이다. +/- 1V의 접지 가능성 차이는 M-LVDS 디바이스가 공개될 때까지 요구되고 있다. M-LVDS는 드라이버와 수신기 사이의 허용 가능한 접지 편이(ground shift)를 2배로 증가시킨다. LVDS와 버스 기반형 디바이스에 통합된 안전장치는 변동될 수 있다. M-LVDS 안전장치는 표준에서 분명하게 명시되고 있으며 나중에 설명될 것이다.
트루 멀티-포인트
M-LVDS는 트루 멀티-포인트(true multi-point) 동작을 지원하기 위해 수많은 추가 기능을 제공한다. 이 원고에서는 강조되지 않지만, 이 부분의 중요성 때문에 간략하게 정리한다.
M-LVDS 디바이스는 일반적으로 백플레인(backplane)에서 이용된다. 이러한 시스템은 커넥터와 라인 카드의 스터브(stub)로 인해 임피던스 불일치를 갖는다. 스터브에서 반사작용을 최소화하기 위해, M-LVDS는 1ns의 최소 전이시간을 명시한다. 1ns는 최대 속도를 제한하나 애플리케이션에서 실제적인 제한을 두지 않는다. 그 이유는 멀티-포인트 신호가 일반적으로 200~400Mbps로 제한되기 때문이다.
M-LVDS 드라이버는 버스가 드라이버 컨텐션(Driver contention)의 조건에서조차 2.4V 이상을 인지하지 않도록 설계되었다. 이 전압 제한은 동일한 M-LVDS 시스템이 정확한 버스 상태를 결정할 수 있는 수신기로 동작할 수 있도록 보장한다.
2가지의 주목하는 추가 기능들은 안전장치와 드라이버 컨텐션이다.안전장치
안전장치(Fail-safe)는 일정한 오류 조건에서 또는 드라이버가 구동하지 않을 때 수신기의 반응을 언급한다. TIA/EIA-899에 이르기까지, LVDS 안전장치는 표준화되지 않았다. 외부 바이어스와 서로 다른 통합형 솔루션들이 사용돼 상호 변경될 수 있는 가능성 문제를 초래하고 있다.
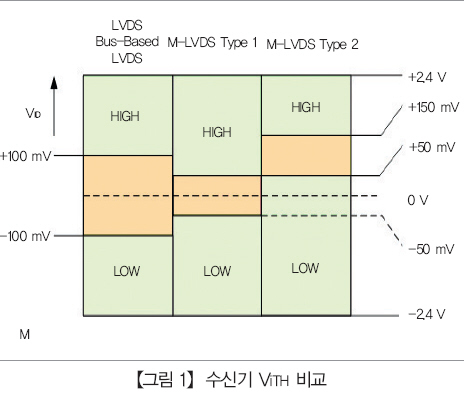
M-LVDS는 특히 안전장치를 규정한다. 표준은 2개의 수신기, 즉 타입-1(+50 mV임계값)이나 타입-2(100mV 오프셋 임계값)를 증명한다. 타입-1의 수신기는 LVDS와 유사하나 더욱 민감하다. 타입-2 수신기는 그림 1에 제시된 것처럼 오프셋 임계값을 요구하면서 표준화된 안전장치를 제공한다.드라이버 컨텐션
하나 이상의 버스가 구동할 때는 어떤 일이 발생할까? 아무 피해 없이 일부 제한 내에서 버스 전압이 유지되는 것이 가장 이상적이다. 드라이버 컨텐션은 점대점이나 다중-드롭 시스템에서 발생하지 않으며 644A 혹은 버스 기반형 LVDS 기술에서 발견되지 않는다. M-LVDS 표준은 드라이버 컨텐션을 해결한다. M-LVDS 드라이버는 버스를 감시하고 버스가 2.4V를 초과하지 않을 정도로 전류를 제한한다. 뿐만 아니라, 작동하지 않는 디바이스와 수신기는 버스 전압을 2.4V로 제한한다.클래스에 따른 상호운영성
드라이버 VOD, 수신기 ViTH , 수신기 ViCM 는 LVDS 디바이스간의 상호운영성을 해결하는 데 있어 중요하다. 표 1에서 언급된 표준화된 VOD 는 3의 계수로 변화한다. 수신기가 증가하는 VOD 레벨을 조절할 수 있을까? 이것은 수신기의 커먼-모드 전압 범위와 최대 차동 입력 전압에 의해 결정될 것이다. 잡음 마진은 상호운영성과 관련된 또 다른 핵심 관련 사항으로 아래에서 언급된다.잡음 마진
잡음 마진 (Noise margin)은 최소 VOD 에서 최대 ViTH 를 뺀 차이로 정의된다. 표 1을 위해 사용된 전류 소스 가정은 표 2에서도 다시 사용된다. 표 2는 데이터 시트 부하에 걸쳐 있는 최소 VOD 와 표준화된 100Ω과 40Ω 부하 테스트를 제공한다. 40 Ω 부하는 멀티-포인트 백플랜 시스템을 위해 실제적인 기대값에 기반해 선택되었다. 644A 표준은 동종 시스템에서 147mV의 잡음 마진을 위해 247mV의 최소 VOD 와 100mV의 최대 ViTH를 제공한다.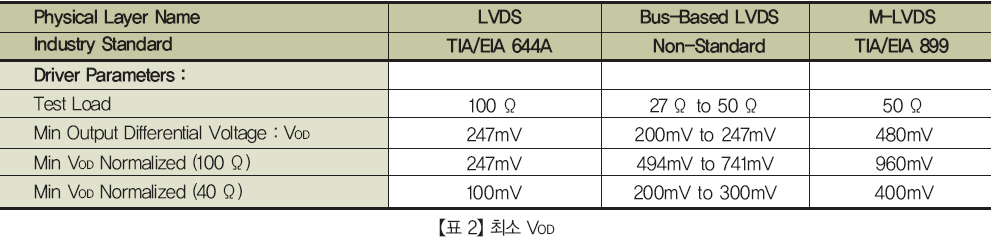
버스-기반형 LVDS 잡음 마진은 각 데이터 시트에 기반한다. 각 데이터 시트는 잡음 마진을 계산하기 위해 분석될 필요가 있다. M-LVDS의 경우, 잡음 마진은 430mV이다. 부하 조건을 이해하는 것은 표 2에서 보여지는 것처럼 중요하다. 표 2는 기술을 혼합해서 이용될 때 잡음 마진과 관련된 문제를 제시하고 있다.
표 3은 동종 시스템과 혼합형 시스템을 위한 잡음 마진을 제시하고 있다. LVDS가 가장 낮은 잡음 마진을 가지고 있더라도, 이것은 100 Ω 환경에서 다른 수신기를 구동시킬 수 있다. 점대점 시스템에서, LVDS는 속도를 위해 향상 선택된다. 동종 시스템에서, M-LVDS는 가장 최고의 잡음 마진을 제공한다. 트루 멀티 포인트 시스템은 더욱 많은 잡음 마진이 필요한 부하를 생성해내며, M-LVDS와 같은 기술을 필요로 한다. 혼합형 기술에 대해 마지막으로 고려해야 하는 부분은 수신기 커먼 모드와 관련이 있다.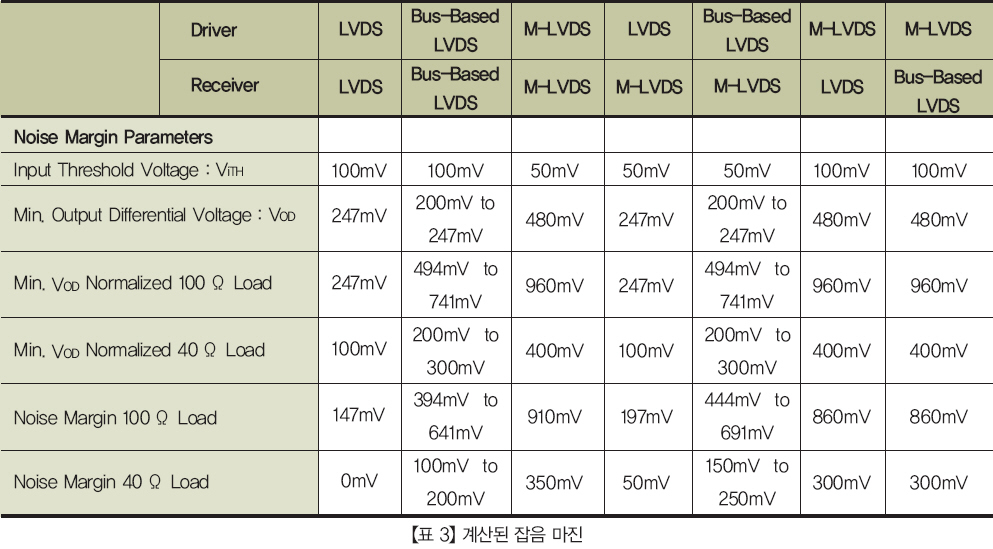
수신기 커먼 모드
대부분의 LVDS 시스템에서, 허용 가능한 접지 차이점은 +/- 1V로 명시된다. 이것이 어느 정도정확하다 하더라도 데이터 시트의 극단적인 상태하에서 견딜 수 있는 허용 가능한 차이점은 이해야 할 것이다. LVDS 드라이버는 1. 125V ~ 1.375V의 커먼 모드 출력 범위를 갖는다. LVDS 수신기는 0V ~ 24V에 이르는 입력을 수용한다. 이것은 수신기가 대략 1V가 될 수 있는 접지 편이를 가질 수 있다는 것을 의미한다. 드라이버가 커먼 모드 극대치에서 최대 VOD 로 작동한다면, 허용된 접지 편이는 800mV에 불과하다. 일부 벤더들은 -4V~5V를 지원하는 SN65LVDS33처럼 더욱 폭넓은 범위로 수신기를 제공한다. M-LVDS 수신기는 -1V ~ 3.4V의 입력 전압 범위를 제공한다.
결론
LVDS 는 수많은 애플리케이션을 위한 기술 선택사항이다. LVDS 기술은 오래된 단일 종단형 기술에 비해 향상된 속도, 저전력, 향상된 EMI를 제공한다. 동종 시스템이 가장 이상적이기는 하지만 각종 기술들이 혼합되는 경우가 있어 문제가 생긴다. 이런 경우, 데이터 시트의 제한 요소를 넘어서면 안 된다. 잡음 마진이 고려되어야 할 뿐만 아니라 애플리케이션의 커먼 모드 범위도 고려되어야 한다. M-LVDS는 향상된 잡음 마진과 진정한 멀티 포인트 동작으로 새로운 유형의 LVDS 신호를 제공한다. 안전장치, 드라이버 컨텐션, 규격 준수는 M-LVDS 솔루션을 이용하면 가능하다. 모든 기술이 기능하면서 함께 상호운용성도 가능하게 되는 것이다.
'Embedded_System > News|Information' 카테고리의 다른 글
'ARM vs Intel' 관전을 위한 교양지식 (0) 2009.01.29 NTSC Reference (0) 2008.06.11 I2C Specification (0) 2008.06.11 댓글
